About Me
Hi! I am a Research Engineer at Skild AI, working on advancing robotics and AI. I completed my MS in Robotics at Carnegie Mellon University, where I was advised by Prof. George Kantor and Prof. Abhisesh Silwal, and collaborated with Prof. David Held and Dr. Francisco Yandun. My interests broadly span robotics, machine learning, and building systems that support real-world applications. Previously, I worked on SplatSim and deployed robots in challenging real-world environments.
Before that, I completed my integrated BS degree from IIIT Hyderabad. I was an undergraduate researcher at Robotics Research Center, advised by Prof. K. Madhava Krishna. I spent my summers of 2021 and 2022 working with Prof. David Held at Carnegie Mellon University. I formulated a differentiable version of linear dynamic systems, which could be used as a building block to accelerate the learning and transfer of policies. I also collaborated with Prof. Makarand Tapaswi on a project that aims to learn manipulation policies directly from human demonstrations like these.
If you're looking for collaborators for Robotics/ML projects, please feel free to get in touch!
research
I want to solve robot manipulation. While most animals can walk or run, very few can manipulate their environments like humans do. There is an inherent simplicity yet profound intrigue in manipulation problems that captivates me.
news
- Sep 15, 2024: Submitted SplatSim to ICRA 2025!
- Jun 30, 2024: Imagine2Servo accepted at IROS 2024!
- Sep 09, 2023: Teaching Assistant for Robot Learning Course!
- Sep 09, 2023: Our paper on time-based inductive bias for RL policies got accepted to an IROS Workshop!
- Aug 14, 2023: Started MS Robotics at CMU!
- Apr 07, 2023: Our paper on data-driven inverse kinematics got accepted to IJCNN, 2023!
- Jun 30, 2022: Our paper on skill learning using differentiable physics has been accepted for presentation at IROS, 2022!
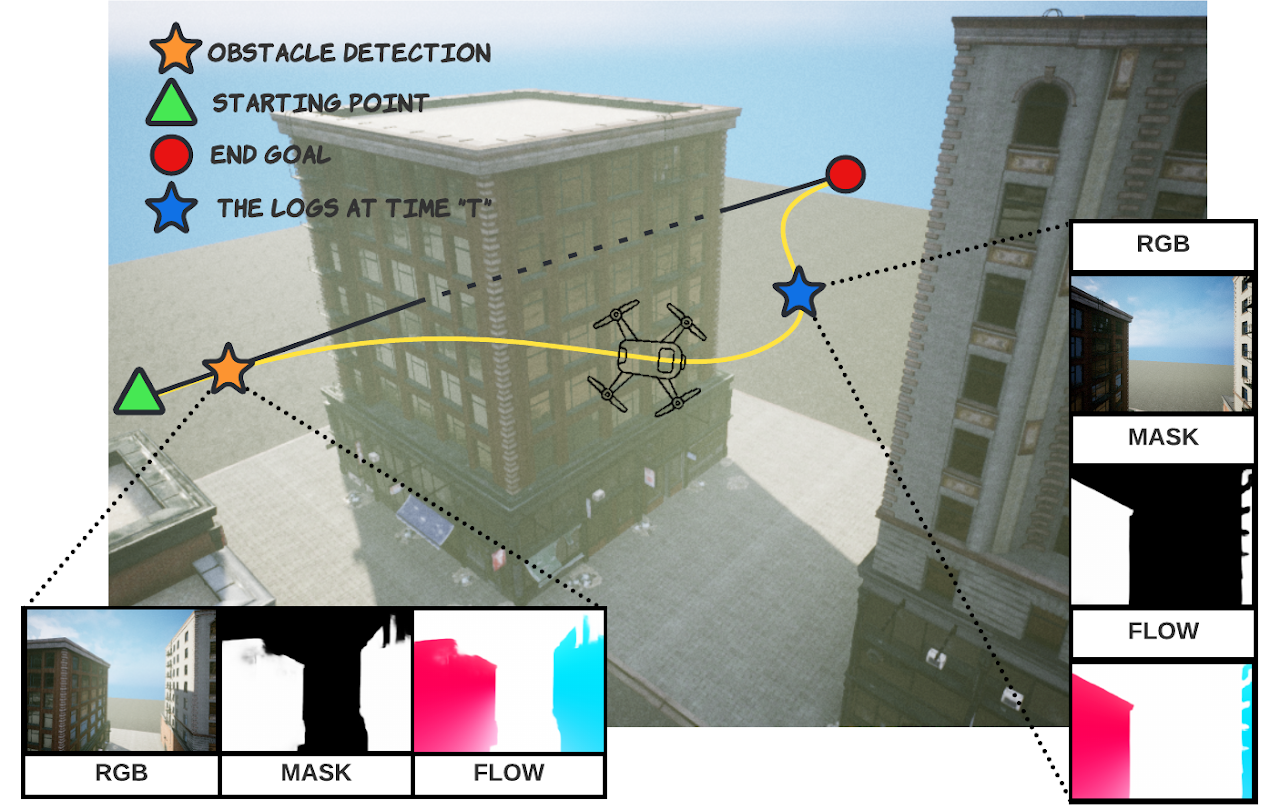
- May 26, 2022: Our paper on Monocular Obstacle Avoidance got accepted to CASE,2022!
- Jan 29, 2022: Our paper on sequenced dynamical systems got accepted to GPL Workshop at ICLR, 2022!
- Jun 30, 2021: Our work on Real Time Visual Servoing has been accepted for presentation at IROS,2021!
- May 05, 2021: Started my internship at R-PAD, Carnegie Mellon University!
- May 02, 2020: Started working at Robotics Research Center!
Publications
Representative publications are highlighted.
( “*” denotes equal contribution. )
SplatSim: Zero-Shot Sim2Real Transfer of RGB Manipulation Policies Using Gaussian Splatting
2025 IEEE International Conference on Robotics and Automation (ICRA), 2025
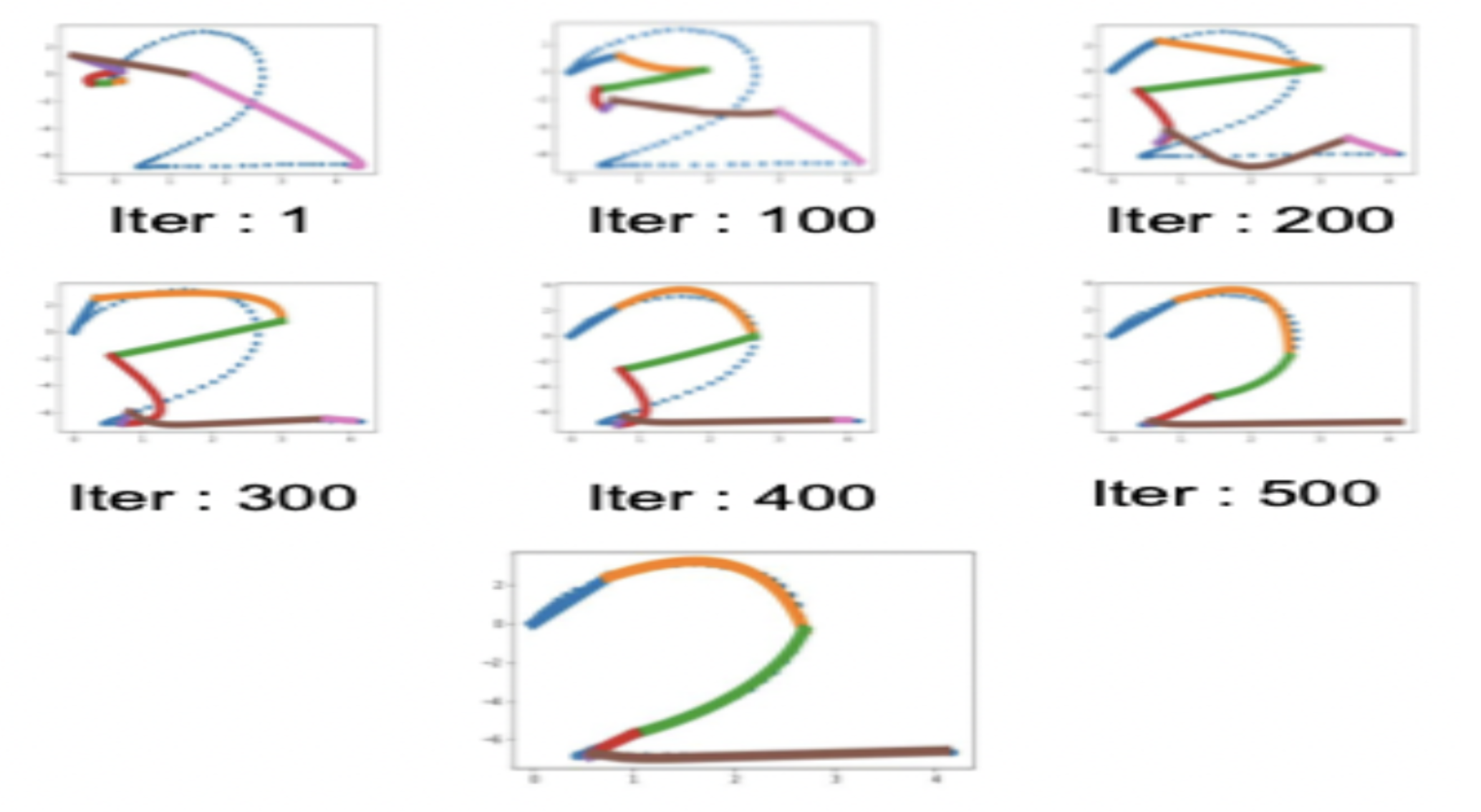
![[ORAL] Imagine2Servo: Intelligent Visual Servoing with Diffusion-Driven Goal Generation for Robotic Tasks](images/iros2024.gif)
[ORAL] Imagine2Servo: Intelligent Visual Servoing with Diffusion-Driven Goal Generation for Robotic Tasks
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
On Time-Indexing as Inductive Bias in Deep RL for Sequential Manipulation Tasks
Learning Meets Model-based Methods for Manipulation and Grasping Workshop @ IROS, 2023
Deep Sequenced Linear Dynamical Systems for Manipulation Policy Learning
ICLR 2022 Workshop on Generalizable Policy Learning in Physical World, 2022
Contact
Please feel free to contact or interact with me through the following links:
- Email: nqafzal [at] gmail
- Google Scholar: M. Nomaan Qureshi
- Twitter: @qunomaan
- GitHub: qureshinomaan